Tìm hiểu về SSD - Single Shot Detector trong bài toán Object Detection
Trong bài viết này, mình sẽ giải thích về cấu trúc mạng SSD - Single Shot Detector dùng trong bài toàn Object Detection. Bạn đọc có thể tham khảo kĩ hơn tại Single Shot MultiBox Detector
Giới thiệu về SSD - Single Shot Detector
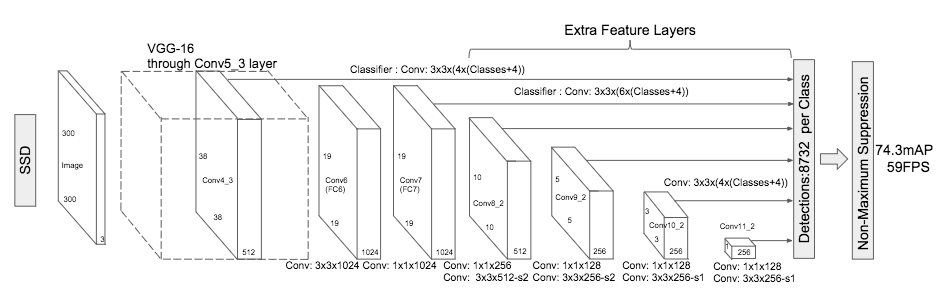
Trước khi bắt đầu vào việc tìm hiểu về cách mà SSD làm việc, chúng ta cùng điểm qua những đặc điểm chính của SSD. Tại mỗi vị trí trên feature map, SSD đặt các default bounding boxes với kích thước, tí lệ khác nhau. Trong quá trình xử lí, SSD sẽ đánh giá và tìm đối tượng trên các bounding box này nhằm tìm ra box phù hợp nhất với đối tượng cần tìm kiếm. Thêm vào đó, bằng việc tìm kiếm trên các feature map khác nhau, SSD có thể tìm kiếm các đối tượng với kích thước khác nhau mà không cần thay đổi kích thước của các bounding box. Thực nghiệm cho thấy, SSD đạt 74.3% mAP trên tập test của VOC2007, đạt 59 FPS khi sử dụng Nvidia Titan X với kích thước ảnh đầu vào 512 x 512, nhanh hơn Faster R-CNN.
Kể từ bài viết này, mình sẽ chia bài viết làm 2 phần. Trong phần đầu mình sẽ giới thiệu qua về cấu trúc để các bạn có thể nắm bắt một cách nhanh nhất, nửa sau của bài viết mình sẽ giới thiệu về phần toán, công thức xây dựng để bạn đọc tìm hiểu kĩ hơn. Với những bạn đọc chỉ tò mò muốn biết Single Shot Detector là gì, cách thức hoạt động thế nào thì có thể xem phần đầu là được rồi :D
Hướng tiếp cận
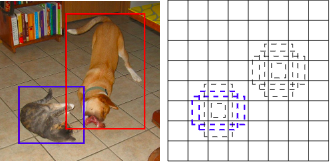
Ý tưởng chính của SSD đến từ việc sử dụng các bounding box, bằng việc khởi tạo sẵn các box tại mỗi vị trí trên ảnh, SSD sẽ tính toán và đánh giá thông tin tại mỗi vị trí xem vị trí đó có vật thể hay không, nếu có thì là vật thể nào, và dựa trên kết quả của các vị trí gần nhau, SSD sẽ tính toán được một box phú hợp nhất bao trọn vật thể.
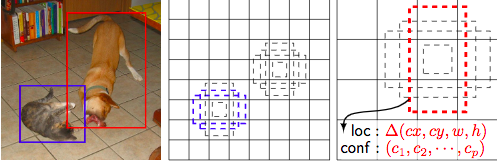
Ngoài ra, bằng việc tính toán bounding box trên các feature map khác nhau, tại mỗi tầng feature map, một box sẽ ôm trọn một phần hình ảnh với các kích thước khác nhau. Như trên ví dụ trên, con mèo và con chó có thể được phát hiện ở 2 tầng feature map khác nhau, 2 kích thước và tỉ lệ khác nhau. Thay vì sử dụng 1 box và thay đổi kích thước box cho phù hợp với vật thể, thì SSD dử dụng nhiều box trên nhiều tầng, từ đó tổng hợp ra vị trí và kích thước box kết quả. Bằng việc loại trừ các region proposal, SDD có thể đạt được tốc tộ xử lí cao hơn Faster R-CNN.
Kiến trúc của SSD
Convolutional predictors for detection
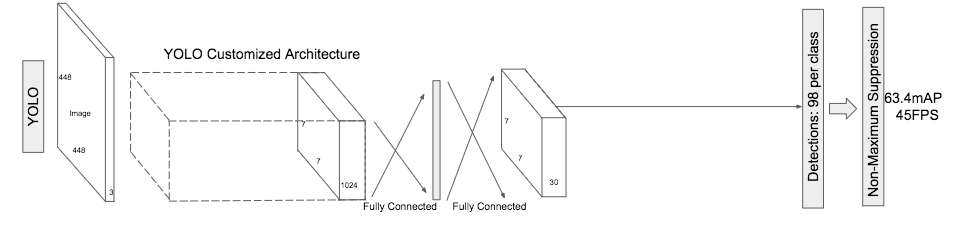
SSD sử dụng VGG16 để extract các feature, tại các tầng feature map được sử dụng để phát hiện vật thể, SSD sử dụng các filter có kích thước 3 x 3 x $ p $ trên các layer dùng để dự đoán thay vì dùng fully connected layer như trên YOLO.
Multi-scale feature maps for detection
Bằng việc sử dụng các filter, kích thước của các feature map sẽ giảm dần theo độ sâu của mạng, hỗ trợ cho việc phát hiện vật thể ở các kích thước và tỉ lệ khác nhau.
Default boxes
Trên một feature map kích cỡ $m$ x $n$, tại mỗi vị trí cell hay tại mỗi pixel, khởi tạo các default bounding box, các box này có vai trò giống như các anchor của Faster R-CNN. Tuy nhiên, vì vị trí mỗi cell cố định nên các box này cũng sẽ được cố định. Tại mỗi cell, giả sử khởi tạo $ k $ box, SSD tính toán phân loại $ c $ class và đồng thời tính toán xem hình dáng của box như thế nào như toạ độ $\left( cx,cy\right)$, dài và rộng $\left(w,h\right)$. Vậy tổng số tính toán là $\left( c + 4 \right)k$ x $m$ x $n$
Training
Việc training SSD yêu cầu cung cấp thông tin về các groundtruth của vật thể bao gồm các thông tin về class, shape.
Tìm các box phù hợp
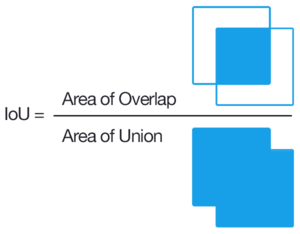
Trong quá trình training, ta tiến hành tìm các default box trên các feature map phù hợp với groundtruth bằng cách tìm các box có jaccard overlap cao. Công thức tính jaccard overlap dựa trên tỉ lệ giữa diện tích vùng trùng nhau giữa 2 tập và diện tích của cả 2 tập hợp lại.
[J\left(A,B\right) = \frac{\vert A\cap B\vert}{\vert A\cup B\vert}]
Các box được lọc có chỉ số jaccard overlap lớn hơn mức threshol 0.5.
Hàm Loss
Hàm loss của SSD được xây dựng bằng localization loss để đánh giá việc phát hiện và confidence loss để đánh giá việc phân lớp đối tượng.
Đặt $ x_{ij}^p $ = { 1, 0 } ứng với default box thứ $i$ khớp với groundtruth thứ $j$ thuộc lớp $p$, ta có hàm Loss sau:
[L\left( x,c,l,g \right) = \frac{1}{N} \left( L_{conf} \left( x,c \right) + \alpha L_{loc}\left(x,l,g\right)\right)]
N ở đây là số lượng những default box phù hợp được tìm ở bước trên. Nếu N = 0 thì Loss = 0.
Hàm Loss $L_{loc}$ được tính bằng Smooth L1 loss giữa box dự đoán ($l$) và groundtruth box ($g$). Với các tham số như điểm chính giữa $\left(cx,cy\right)$ của default box ($d$) và chiều dài ($w$), chiều rộng ($h$). $\alpha$ được đặt là 1.
Localization Loss
[L_{loc}\left( x,l,g \right) = \sum^N_{i\in Pos} \sum_{m\in{cx,cy,w,h}} x_{ij}^k smooth_{L1}\left( l_i^m - \hat{g}^m_j\right)]
Dành cho những bạn nào không biết Hàm Smooth L1:
[smooth_{L1_{plot}} \colon= piewise\left( abs\left( x \right) \lt 1, 0.5x^2, abs\left( x \right) - 0.5\right)]
Hoặc
| [\begin{cases}0.5x^2 & \text{if $ | x | \lt 1$} \ \vert x \vert - 0.5 & \text{otherwise}\end{cases}] |
Quay trở lại, $\hat{g}^m_j$ được tính toán như sau:
[\hat{g}_j^{cx} = \left( g_j^{cx} - d_j^{cx} \right)/ d_j^w]
[\hat{g}_j^{cy} = \left( g_j^{cy} - d_j^{cy} \right) / d_j^h]
[\hat{g}_j^w = \log\left( \frac{g_j^w}{d_j^w} \right)]
[\hat{g}_j^h = \log\left( \frac{g_j^h}{d^h_i} \right)]
Confidence Loss
[L_{conf} \left( x,c \right) = - \sum_{i \in Pos}^N x_{ij}^p \log \left( \hat{c}i^p \right) - \sum{i \in N eg} \log\left( \hat{c}_i^p \right)]
với
[\hat{c}_i^p = \frac{\exp\left( c_i^p \right)}{\sum_p \exp\left( c_i^p \right)}]
Chọn kích thước và tỉ lệ cho default box
Các feature map ở độ sâu khác nhau sẽ có kích thước khác nhau, vì vậy, kích thước của các default box cũng được thay đôi theo độ sâu của feature map. Ví dụ với độ sâu là m (bao gồm m feature map tại bước detect):
[s_k = s_{min} + \frac{s_{max} - s_{min}}{m - 1} \left( k - 1 \right), \text{k} \in \left[1,m \right] \text{,} s_{min}=0.2 \text{,} s_{max}=0.9]
Vậy với m = 3, ta lần lượt sẽ có $s_1$ = 0.2, $s_2$ = 0.55, $s_3$ = 0.9
Với tỉ lệ giữa chiều dài và rộng của box, sẽ được tính với $a_r \in { 1, 2, 3, \frac{1}{2}, \frac{1}{3} } $
Chiều dài và rộng có thể được tính từ $a_r$:
[w_k^a = s_k \sqrt{a_r}]
[h_k^a = s_k / \sqrt{a_r}]
Với trường hợp tỉ lệ bằng 1, ta thêm 1 box nữa với kích thước là ${s\prime}_k = \sqrt{s_ks_k+1}$ Như vậy, trên một vị trí của feature map sẽ có tổng cộgn 6 bounding box. Tâm điểm của mỗi box sẽ được tính bằng:
[\left( \frac{i+0.5}{\vert f_k \vert}, \frac{j+0.5}{\vert f_k \vert} \right)]
Với $\vert f_k \vert$ là kích cỡ cửa feature map hình vuông. $i , j$ là vị trí của cell.
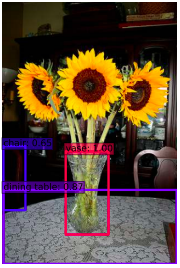
Dưới đây là một số hình ảnh chạy thức nghiệm của SSD, các kết quả so sánh với các phương pháp khác bạn đọc vui lòng tham khảo thêm trong bài báo.

Bài viết xin dừng lại tại đây, nếu có gì cần thảo luận bạn đọc vui lòng để lại bình luận.